Прецизионная поворотка своими руками.
Назад-
За 1.5 года кипения моих мозгов вокруг точной поворотки пересмотрел в инете наверно все датчики положения какие только существуют.
Это такая жуткая разносортица по интерфейсам и прочему что голова раскалывается. Причём они еще и умудряются протоколы интерфейсов под себя закривлять. Ценовой вопрос ещё хлеще (у них от 250 у.е. и наверно до бесконечности).
Потом обнаружил серию бесконтактных датчиков углового положения (магнитных энкодеров) для точного измерения углового перемещения при повороте на 360° AS5043 - это 10-бит(точность 0,35°) всего за 7.09EURO , позже появились AS5045 - за 8.21EURO, но уже 12-бит
(точность 0,088°) . К ним ещё нужен магнит цена которого не стоит времени описания.
У первых последовательный интерфейс SSI и аналоговый выход от 0 до 5 вольт что сразу привлекло востребованностью для широкого круга наших коллег в качестве "кругового резистора" для аналоговых повороток. Уже проверено - по аналоговому выходу цены ему нет (реальные 360 и никогда не сотрётся), а вот по цифре похоже нет смысла заморачиваться из-зи 10-бит. Есть у меня идея их корпусировать и внедрять в народ как с выходным валом и как инклинометр с внутренним грузом в масляной среде, но токарник с ЧПУ запустят только в конце апреля, да и наверно сразу на него заказов понавалят. Поэтому идея пока в столе лежит. Ещё надо обсудить тип корпуса - кому чего удобней, но мне кажется что стоит повторить конструктив A2 и A2T от US-digital.
У вторых ШИМ и последовательный интерфейс SSI. ШИМ вообще скорее не для нашего применения, а вот SSI (синхронный последовательный интерфейс) уже интересней, но применялся только в одной любительской конструкции, да и то с конвертером интерфейса (конечно можно пойти таким путём и привести их к стандарту например US-digital и сделать полный аналог A2 и A2T). Датчики могут наращиваться последовательно на шину SSI,- вот это и привело к идее использования промежуточного вала редуктора для повышения разрешающей способности привода на недорогих датчиках. Например в варианте Вашей сборки двух редукторов это решение напрашивается само собой. Суть такая что внутри дискреты основного датчика мы получаем ещё кучу дискрет вторичного датчика.
По вопросам обработки датчиков и принятия решения куда и с какой скоростью крутить был соблазн управлять напрямую с компа по RS-422/485 (мои частотники Omron 3G3MV его имеют, да и датчики нормальные тоже, а ненормальные можно переконвертировать), но доверяться компу не хочу, поэтому есть желание сделать отдельный контроллер, но размещать его прямо внутри колонки поворотки. До него можно данные с компа хоть по оптике гнать. Частотники тоже наверно надо ставить там, потому как на линии частотник - асинхронник они устраивают такие помехи что всё остальное покажется шопотом.
Вот и думаю что дальше делать и в каком направлении плыть.
Интересно выслушать все мнения.
Ссылки по теме :
http://www.yeint.ru/suppliers/ams/ams_Rotary_Encoders.php магнитные энкодеры - диллер Austriamicrosystems
http://www.usdigital.com/products/products.shtml энкодеры US-digital
http://omron.com.ru/cgi-bin/dynamic/show.cgi?razdel=99&mat_id=759 частотники Omron 3G3MV
http://picasaweb.google.ru/RU3MD1/EME моё железо от Метеорит-2 -
Потом обнаружил серию бесконтактных датчиков углового положения (магнитных энкодеров) для точного измерения углового перемещения при повороте на 360° AS5043 - это 10-бит(точность 0,35°) всего за 7.09EURO , позже появились AS5045 - за 8.21EURO, но уже 12-бит
(точность 0,088°) . К ним ещё нужен магнит цена которого не стоит времени описания.
У первых последовательный интерфейс SSI и аналоговый выход от 0 до 5 вольт что сразу привлекло востребованностью для широкого круга наших коллег в качестве "кругового резистора" для аналоговых повороток. Уже проверено - по аналоговому выходу цены ему нет (реальные 360 и никогда не сотрётся),
И эти (10 битные) реально можно приобрести за рубли?
Так хорошо вписывается в уже готовые интерфейсы..... -
И эти (10 битные) реально можно приобрести за рубли?
В Москве без проблем. Мне были любезно предоставлены 3 штуки для тестирования бесплатно.
Так хорошо вписывается в уже готовые интерфейсы.....
Проблема только в том что они представляют собой обычную микросхему над которой должен вращаться специальный магнит, и соответственно всё это нужно засунуть в удобоваримый корпус.
Сделать массово герметичный корпус с валом и корпус со встроенным грузиком (для элевации) у меня есть возможность. Вот только надо выбрать удобный для всех конструктив.
 rotary.jpg
rotary.jpg
-
Очень интересный конструктив, но для массовости нужно знать реальную цену магнита+датчик, а о корпусе можно подумать, например использовать готовые корпуса от сервоприводов старых дисководов или принтеров. И немаловажный вопрос о покупке этих датчиков, некоторые конторы (в основном работающие от производителей) не желают и слышать о работе с физическими лицами, а для массовости нужен реальный канал покупки этого железа, я думаю из девятого района ради двух микросхем никто в Москву не поедет. Иначе это останется лишь конструкцией одного автора. Есть вариант пойти по пути DB6NT - делать готовые или KIT наборы, тогда это ляжет на плечи одного черовека (возможно и придыль ему принесёт, хотя помоему никто ещё на этом ничего не заработал) , комплект должен содержать датчики , програмное обеспечение и плату и детали контроллера, причём можно предусмотреть разные варианты с разной точностью и разными сервис-функциями ну и ценой соответственно.
-
Интересует конечная цена, если в 500 руб уложится думаю спрос будет
Конечной цены как и готового к продаже изделия пока нет по простой причине:
Я пару точно возьму, для началаЦитироватьВот только надо выбрать удобный для всех конструктив.
Цена основных комплектующих в закупке составляет:
262р.81к. - AS5043
17р.83к. - магнит
Туда еще необходимо добавит плату, корпус и работу.
Схема элементарная, хотя по питанию надо ещё стабилизатор поставить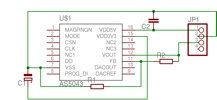
Вот один из вариантов реализации в корпусе от резистора (может кому и это подойдёт)
Данные примеры взяты тут:
http://dev.sinusoid.com/articles/2007/11/01/as5043-housing
-
Очень интересный конструктив, но для массовости нужно знать реальную цену магнита+датчик, а о корпусе можно подумать, например использовать готовые корпуса от сервоприводов старых дисководов или принтеров. И немаловажный вопрос о покупке этих датчиков, некоторые конторы (в основном работающие от производителей) не желают и слышать о работе с физическими лицами, а для массовости нужен реальный канал покупки этого железа, я думаю из девятого района ради двух микросхем никто в Москву не поедет. Иначе это останется лишь конструкцией одного автора. Есть вариант пойти по пути DB6NT - делать готовые или KIT наборы, тогда это ляжет на плечи одного черовека (возможно и придыль ему принесёт, хотя помоему никто ещё на этом ничего не заработал) , комплект должен содержать датчики , програмное обеспечение и плату и детали контроллера, причём можно предусмотреть разные варианты с разной точностью и разными сервис-функциями ну и ценой соответственно.
Хорошая идея ( высокоточные абсолютные энкодеры- сильно кусаются по ценам ) Интересный вариант предложил Hannes OE5JFL :
http://www.qsl.net/oe5jfl/ и http://www.qsl.net/oe5jfl/encoder.htm , правда точность 0.5 градуса....но и это неплохо для начала -
Очень интересный конструктив, но для массовости нужно знать реальную цену магнита+датчик, а о корпусе можно подумать, например использовать готовые корпуса от сервоприводов старых дисководов или принтеров. И немаловажный вопрос о покупке этих датчиков, некоторые конторы (в основном работающие от производителей) не желают и слышать о работе с физическими лицами, а для массовости нужен реальный канал покупки этого железа, я думаю из девятого района ради двух микросхем никто в Москву не поедет. Иначе это останется лишь конструкцией одного автора. Есть вариант пойти по пути DB6NT - делать готовые или KIT наборы, тогда это ляжет на плечи одного черовека (возможно и придыль ему принесёт, хотя помоему никто ещё на этом ничего не заработал) , комплект должен содержать датчики , програмное обеспечение и плату и детали контроллера, причём можно предусмотреть разные варианты с разной точностью и разными сервис-функциями ну и ценой соответственно.
С закупкой у меня вопросов нет.
Про прибыль мыслей нет, только бы как всегда самому не пролететь.
Препрограмирование делать могу (там варианты выдачи напряжения 0-5в при повороте на 360, 180 и 90 градусов как по часовой так и против).
Можно конечно и контроллер сделать, но открытой хорошо работающей простой конструкции на просторах инета нет, а те что есть с глюками.
Например понравился LVB Tracker (Mail Howard, G6LVB).
http://www.g6lvb.com/Articles/LVBTracker/index.htm
После сборки и длительной работы на стенде обнаружились глюки (не только у меня, хотя есть народ утверждающий что всё нормально - но это просто ещё не разобрались). Пытался списаться с автором - ответа нет. Да и данный вариант с разрешением всего 1 градус, хотя наверно многим этого достаточно.
Для исправления ошибок нет компилятора CC5X, код длиннее 1к поэтому под фри не лезет. -
Хорошая идея ( высокоточные абсолютные энкодеры- сильно кусаются по ценам ) Интересный вариант предложил Hannes OE5JFL :
Ну куда такие навороты
http://www.qsl.net/oe5jfl/ и http://www.qsl.net/oe5jfl/encoder.htm , правда точность 0.5 градуса....но и это неплохо для начала
0.5 достижимо на аналоге применением контроллера с АЦП -задача для PIC.
В цифре всё можно реализовать на одной Атмеге.
Думаю в предустановках контроллера сделать ввод кофф. редуцирования для вторичного датчика.
Если коэф.= 1 значит второй датчик не используется. А вот если там 400 (как в моём случае), то относительная точность будет составлять 0,00... -
Cоласен Константин , Вам сильно повезло с "железом" от МЕТЕОРИТ 2 ....такие навороты самому трудно сделать...
Вообще здорово , когда можно использовать в нашем деле задел от еще Советского ВПК...трудно найти такие раритеты...многое уже до нас...растащили -
Нужен реальный конструктив датчик+ схема+программа (для многих и печатка проблема) Всё это в архивчик и я первый на очереди за покупками

-
Нужен реальный конструктив датчик+ схема+программа (для многих и печатка проблема) Всё это в архивчик и я первый на очереди за покупками
Тема очень интересна и на данное время гореча.Также готов приобрести -
Cоласен Константин , Вам сильно повезло с "железом" от МЕТЕОРИТ 2 ....такие навороты самому трудно сделать...
Это везение мне обошлось в солидную кучу денег.
Вообще здорово , когда можно использовать в нашем деле задел от еще Советского ВПК...трудно найти такие раритеты
Один демонтаж со здания только ...
Но оно того стоит.
Штатно там стояли движки 400Гц с управляемой скоростью вращения - я переделал на обычные асинхронники.
Из плюсов - она многооборотная с кучей солидных токосъёмов.
Из минусов - там нет червяков или чего-то подобного, т.е. свободно вращаемая. Но этот вопрос решается очень просто при помощи частотников и эл. тормоза.
Тормоза электромагнитные:
http://www.belrobot.by/catalog.asp?sect=2&subsect=4&page=18#header
Вот только я никак их там купить не могу - от часного лица денег не берут, а тем более от иностранца
Есть у неё и парковочное устройство сравнимое с камазовским тормозомЦитировать...многое уже до нас...растащили
А многое уже и у нас утащили
-
я больше практик , нежели теоретик - аналоговые датчики хороши.....на бумаге и на столе...замучился в свое время с климатикой и температурной нестабильностью...система обрастала дополнительными приспособами...как снежный ком....да и не только я сталкивался с такими проблемами..., эта тема обсуждалась не раз и на зарубежных ЕМЕ сайтах....Возможны различные варианты реализации....Например фирма ANDREW в своих профессиональных системах наведения в C и Ku диапазонах для парабол диаметром 7.3 -9.4м использует...прецизионные сельсины ( стоят прямо на осях вращения по азимуту и углу места )...,
0.5 достижимо на аналоге применением контроллера с АЦП -задача для PIC.
Любая работа определяется и оценивается конечным полученным результатом. Еще раз спасибо, что открыли отдельную тему. Уверен,что результаты Вашей рабуты будут интересны и полезны многим. -
Мне кажеться использовать аналоговый выход этих датчиков бесперспективно, вот еслибы цифровой задействовать, но я в этом ноль, к сожалению
-
Мне тоже повезло - асинхронники с электромагнитными тормозами привез для 6ки вместе с "леопардовским" башенным погоном из Германии - с этими тормозами тоже иногда проблемы по климатике случаются - прошлой зимой...шли дожди...а потом врезал мороз за 20...и тормоза намертво встали...пришлось обматывать движки термолентой и одевать на них "памперсы"
Тормоза электромагнитные:
http://www.belrobot.by/catalog.asp?sect=2&subsect=4&page=18#header
Вот только я никак их там купить не могу - от часного лица денег не берут, а тем более от иностранца
Вообще - если стоит вопрос о оперативном вводе Вашей поворотки в эксплуатацию могу безвозмездно оказать в этом некоторое содействие датчиками и контроллером а ля W2DRZ . Дима RA3AQ это хозяйство видел